文書要約、自然言語による画像修正など
自然特徴点をランドマーク(目印)に
全方位カメラを車椅子上に設置
レーザーレンジスキャナを車椅子前部に床上20cmで設置
任意の経路を学習。出発地点付近に戻してから自律移動

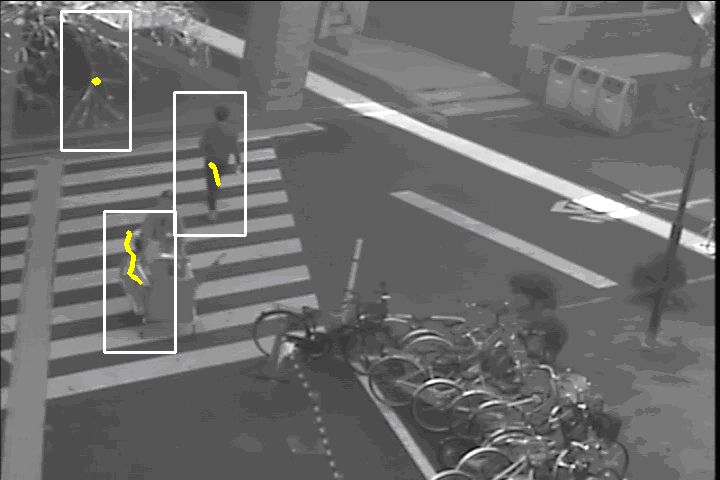
可視光カメラ、近赤外線カメラ
HOG特徴量をもとに人物検出
検出した人物を追跡
顔向き入力によるテレビ制御システムの開発
- 体の不自由な人を支援するシステム -
顔の大きさ、場所によらない顔向き検出
顔向きによりテレビのスイッチ・オン/オフ、チャンネル操作を実現

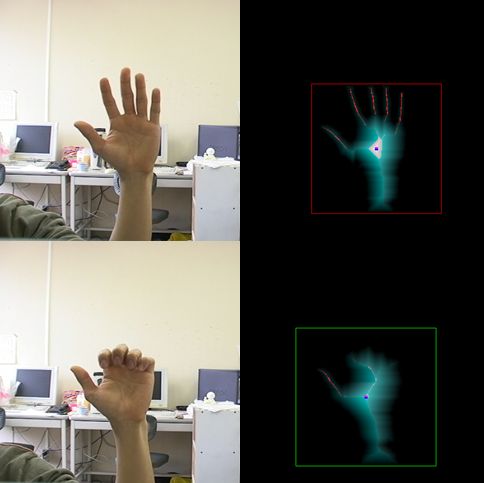
キーボードに不慣れな人やキーボードが使えない人
キーボードが使えない環境
ハンドジェスチャで文字入力
手のひらの中心をマウスポインタの位置とし、グーでクリック
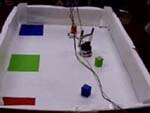
自ら学習するロボット
ロボットが自律的に色を見分けられるか?
ロボットが色を見分けて、ターゲットをつかみ、
同色の床に運ぶという一連の動作を学習させる。
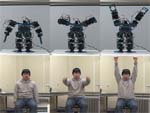
単眼カメラを用いてロボットが人の姿勢を真似る。
ロボットモデルから人間の関節に相当する位置の座標と各モーター
角度との関係性をニューラルネットワークにより学習することで、
人の動作に合わせてロボットが姿勢を真似ることができる。